| Layer name | Observed Flood Extent (GFM) |
| Tag | Flood |
| Folder | Eo Satellite |
| Source | GFM |
| Description |
The GFM product output layer S-1 Observed Flood Extent identifies the pixels covered by flood-water, mapped using Sentinel-1 (S-1) SAR backscatter intensity. Pixels that are normally under water (identified based on the monthly Sentinel-1 Reference Water Mask) are not part of the Sentinel-1 Observed Flood Extent. Sentinel-1 Observed Flood Extent is derived using the GFM ensemble flood mapping algorithm, as described in the dedicated section of this PUM. To map flood extent pixels for a certain date, the algorithm uses as input the S-1 data overpass plus offline-generated S-1 SAR parameters and auxiliary thematic datasets such as Exclusion Mask and topography (e.g. digital elevation models and HAND index). The relative orbit path information, to select the corresponding offline-generated S-1 SAR parameters, is extracted from the S-1 Metadata. During the near real-time operation of the GFM product, the acquisition month of the S-1 scene is retrieved from the S-1 Metadata and the corresponding monthly Sentinel-1 Reference Water Mask is cropped to the extent of the processed S-1 scene. |
| Screenshot |
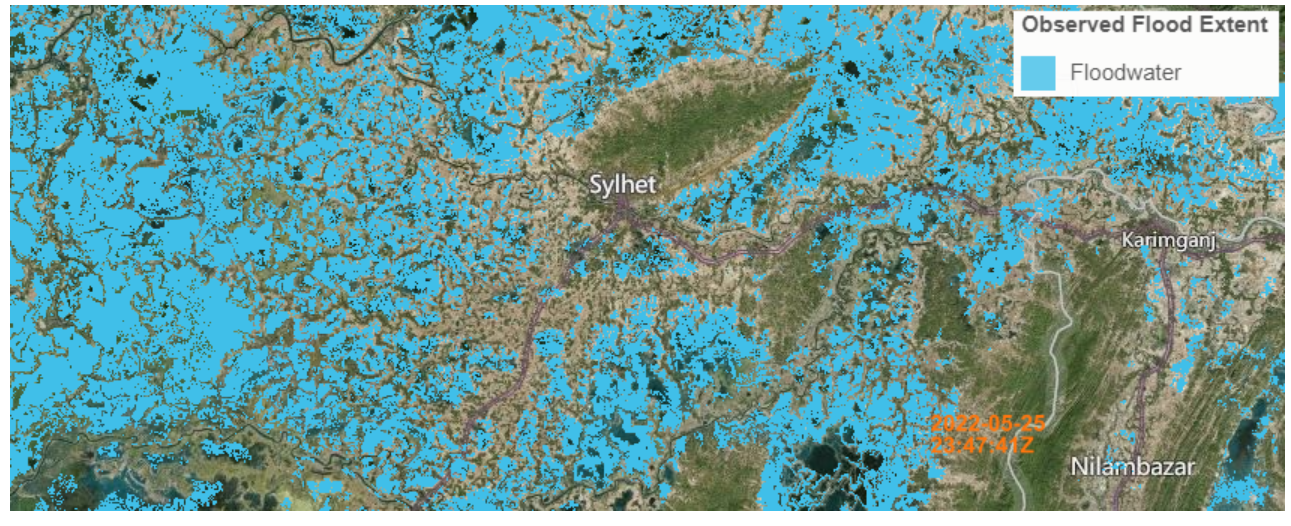
|
| Properties | |
| Available variables | Observed Flood Extent |
| Available accumulations | |
| Available interpolation algorithms | |
| Available filters | |
| Spatial aggregations |