| Nom de la couche | Étendue des inondations observées (GFM) |
| Étiquette | Inondation |
| Dossier | |
| Source | GFM |
| Description |
La couche de sortie du produit GFM S-1 Observed Flood Extent identifie les pixels couverts par les eaux de crue, cartographiés à l'aide de l'intensité de rétrodiffusion Sentinel-1 (S-1) SAR. Les pixels qui sont normalement sous l'eau (identifiés sur la base du masque d'eau de référence Sentinel-1 mensuel) ne font pas partie de l'étendue des inondations observées Sentinel-1. L'étendue des inondations observées Sentinel-1 est dérivée à l'aide de l'algorithme de cartographie des inondations d'ensemble GFM, comme décrit dans la section dédiée de ce PUM. Pour cartographier les pixels d'étendue d'inondation pour une certaine date, l'algorithme utilise comme entrée le passage supérieur des données S-1 ainsi que les paramètres SAR S-1 générés hors ligne et les ensembles de données thématiques auxiliaires tels que le masque d'exclusion et la topographie (par exemple, les modèles d'élévation numériques et l'indice HAND). Les informations sur la trajectoire relative de l'orbite, pour sélectionner les paramètres S-1 SAR correspondants générés hors ligne, sont extraites des métadonnées S-1. Pendant le fonctionnement en temps quasi réel du produit GFM, le mois d'acquisition de la scène S-1 est extrait des métadonnées S-1 et le masque d'eau de référence Sentinel-1 mensuel correspondant est recadré dans la mesure du S-1 scène. |
| Capture d'écran |
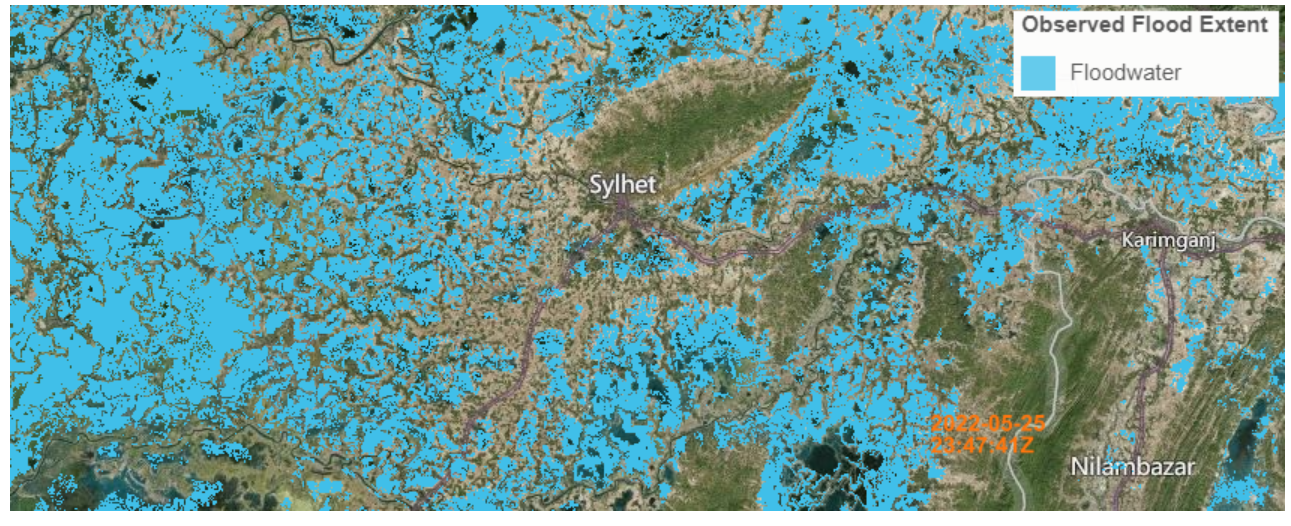 |
| Propriétés | |
| Variables disponibles | |
| Accumulations disponibles | |
| Algorithmes d'interpolation disponibles | |
| Filtres disponibles | |
| Agrégations spatiales |