| Nom de la couche | Valeurs d'incertitude (GFM) |
| Étiquette | Inondation |
| Dossier | |
| Source | GFM |
| Description |
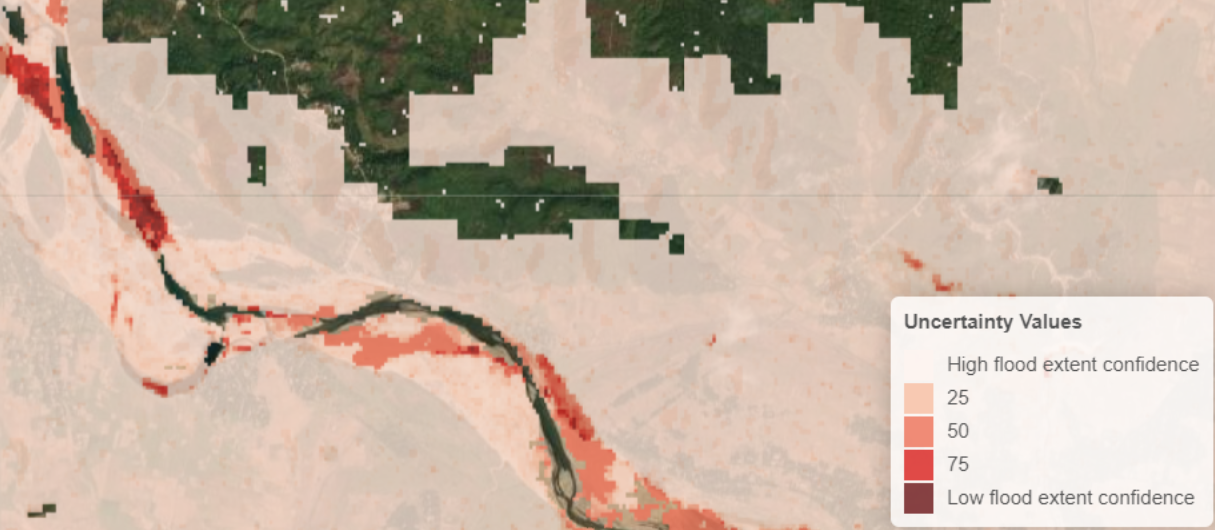
Des valeurs d'incertitude agrégées sont générées avec le produit de carte binaire en tant qu'évaluation simplifiée de la confiance dans l'approche de détection de l'étendue des inondations d'ensemble. Premièrement, les informations sur l'incertitude de chacun des algorithmes individuels sont exprimées dans la même plage numérique [0, 100] pour assurer la comparabilité et faciliter une harmonisation plus poussée. En particulier, les valeurs probabilistes de l'algorithme LIST et les valeurs d'appartenance floues de l'algorithme DLR sont d'abord converties en incertitude de classification, puis multipliées par un facteur de 100. Pour l'algorithme DLR , étant donné que les valeurs d'appartenance floues ne sont attribuées qu'aux pixels d'eau, tous les pixels non inondés se voient attribuer une valeur de 0. La conversion de ces valeurs probabilistes (resp. d'appartenance floue) s'effectue comme suit : U = Wi * (100 - Pi) + (1 - Wi) * Pi où:
Les valeurs d'incertitude de classification de l'algorithme TU Wien, comprises entre 0 et 1000, sont divisées par 10 afin de tomber dans la plage [0,100]. Finalement, la moyenne des incertitudes des trois algorithmes est prise. Cela a une valeur dans la gamme de [0, 100], où les valeurs proches de 100 indiquent une confiance élevée dans l'approche de détection de l'étendue de l'inondation d'ensemble. Par conséquent, les informations sur l'incertitude fournies avec le produit cartographique indiquent le degré de confiance associé à la classification S-1. Les utilisateurs finaux peuvent ensuite utiliser des produits cartographiques d'inondation très précis pour identifier les besoins en ressources dans les zones exposées aux inondations afin de prendre des décisions d'intervention d'urgence en temps opportun. |
| Capture d'écran |
 |
| Propriétés | |
| Variables disponibles | |
| Accumulations disponibles | |
| Algorithmes d'interpolation disponibles | |
| Filtres disponibles | |
| Agrégations spatiales |