| Nome da camada | Extensão de inundação observada (GFM) |
| Tag | Inundações |
| Pasta | Eo Satélite |
| Fonte | GFM |
| Descrição |
A camada de saída do produto GFM S-1 Observed Flood Extent identifica os pixels cobertos por água de inundação, mapeados usando a intensidade de retrodifusão SAR do Sentinel-1 (S-1). Os pixéis que estão normalmente debaixo de água (identificados com base na máscara de água de referência mensal do Sentinel-1) não fazem parte da extensão de inundação observada do Sentinel-1. A extensão de inundação observada do Sentinel-1 é derivada utilizando o algoritmo de mapeamento de inundações do conjunto GFM, conforme descrito na secção dedicada deste PUM. Para mapear os píxeis da extensão das cheias para uma determinada data, o algoritmo utiliza como entrada os dados do S-1, mais os parâmetros SAR do S-1 gerados offline e conjuntos de dados temáticos auxiliares, como a máscara de exclusão e a topografia (por exemplo, modelos digitais de elevação e índice HAND). A informação relativa à trajetória da órbita, para selecionar os parâmetros SAR S-1 gerados fora de linha correspondentes, é extraída dos metadados S-1. Durante o funcionamento quase em tempo real do produto GFM, o mês de aquisição da cena S-1 é obtido a partir dos metadados S-1 e a correspondente máscara de água de referência mensal do Sentinel-1 é recortada na extensão da cena S-1 processada. |
| Captura |
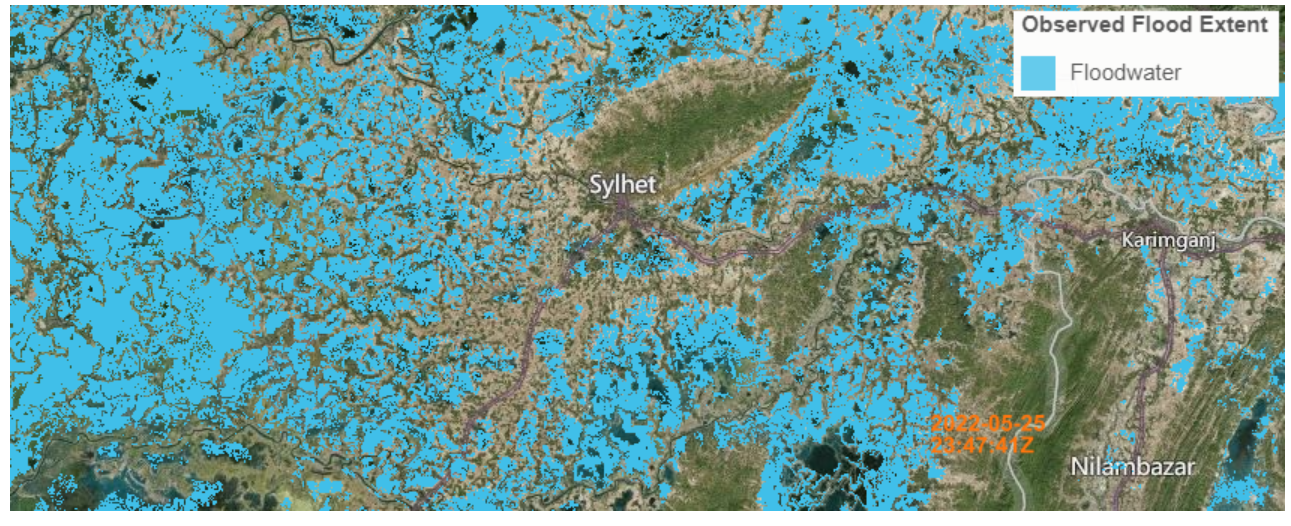 |
| Propriedades | |
| Variáveis disponíveis | Extensão de inundação observada |
| Acumulações disponíveis | |
| Algoritmos de interpolação disponíveis | |
| Filtros disponíveis | |
| Agregações espaciais | |