| Nome da camada | Valores de incerteza (GFM) |
| Tag | Inundações |
| Pasta | Eo Satélite |
| Fonte | GFM |
| Descrição |
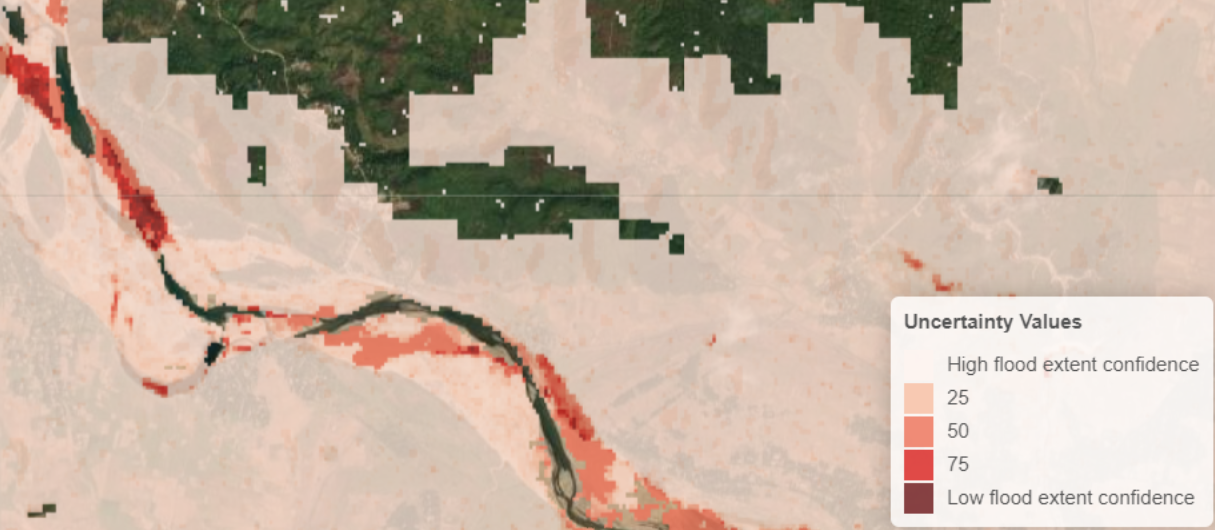
Os valores de incerteza agregados são gerados juntamente com o produto do mapa binário como uma avaliação simplificada da confiança na abordagem de deteção da extensão das inundações do conjunto. Em primeiro lugar, a informação de incerteza de cada um dos algoritmos individuais é expressa no mesmo intervalo numérico [0, 100] para garantir a comparabilidade e facilitar a harmonização posterior. Em particular, os valores probabilísticos do algoritmo LIST e os valores de associação difusa do algoritmo DLR são primeiro convertidos em incerteza de classificação e depois multiplicados por um fator de 100. No caso do algoritmo DLR, uma vez que os valores de associação difusa só são atribuídos a pixéis de água, é atribuído um valor 0 a todos os pixéis não inundados. A conversão destes valores probabilísticos (ou de associação difusa) é efectuada da seguinte forma U = Wi * (100 - Pi) + (1 - Wi) * Pi onde:
Os valores de incerteza da classificação do algoritmo TU Wien, que variam entre 0 e 1000, são divididos por 10 de modo a ficarem dentro do intervalo [0,100]. Por fim, é adoptada a média das incertezas dos três algoritmos. Este valor situa-se no intervalo de [0, 100], em que os valores próximos de 100 indicam uma elevada confiança na abordagem de deteção da extensão das inundações do conjunto. Consequentemente, a informação sobre a incerteza fornecida juntamente com o produto cartográfico comunica o grau de confiança associado à classificação S-1. Os utilizadores finais podem então utilizar produtos cartográficos de inundações altamente seguros para identificar as necessidades de recursos em zonas de exposição a inundações, a fim de tomar decisões atempadas de resposta a emergências. |
| Captura |
|
| Propriedades | |
| Variáveis disponíveis | Valores de incerteza |
| Acumulações disponíveis | |
| Algoritmos de interpolação disponíveis | |
| Filtros disponíveis | |
| Agregações espaciais | |